Research
Here are a list of projects and researches that I was involved with.
3D Imaging Radar Indoor SLAM
Robot Perception Lab @ Carnegie Mellon University
| Perception | SLAM | C++ | Python |
3D Imaging radar aims at providing robust perception
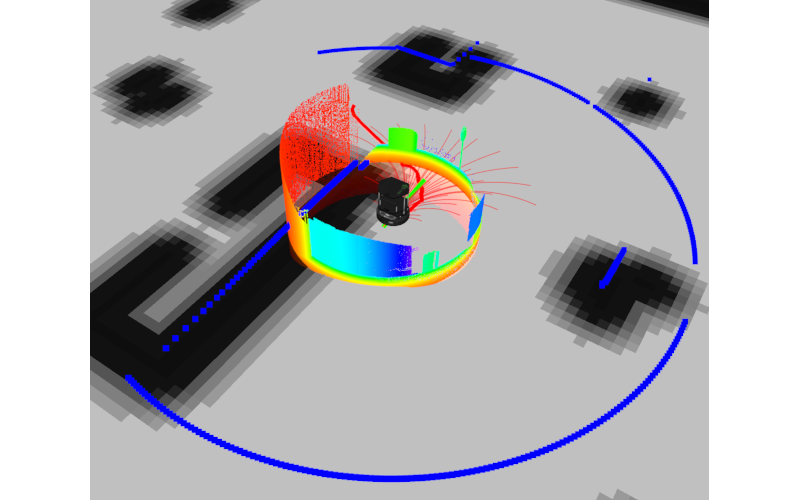
Egocentric Mobile Robot Navigation
IVALab @ Georgia Tech
| Perception | Motion Planning / Navigation | C++ | MATLAB |
Vision based navigation aims at deriving local planning controls through 2.5D (RGBD) input. Conventional methods register unexpected obstacles as high cost areas in local costmaps and plans motion path around them. These approaches hightened computation costs as the size of costmap scales up as well as when prediction horizon rolls further.
Vision based navigation aims at planning directly from sensor inputs for scalability. More information how on we leverage perception data for faster, and safer planning.
Stochastic MPC with Uncertain Environment Interaction
LSR @ TUM via Summer Research (PREP)
| Optimization | Control | MATLAB | Julia |
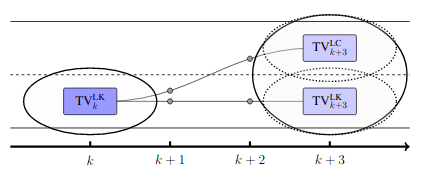
This research project looks at using stochastic model predictive control, a type of probabilistic optimal controller, to deal with scenarios in autonomous driving in highway scenarios.
Specifically, it examines how different structures of prediction affects the controller’s ability to generate feasible and safe trajectory under the interaction with a target vehicle that reacts correspondingly towards the controlled device’s behavior.
More information on how we attempt to factor the interaction prediction into the controller and leverage on such behaviour as chance constraints in optimization.
My participation in the following lab would not be possible without the generous sponsors through Georgia Tech ECE’s Opportunity Research Scholar’s (ORS) Program.
Recursive Least Squares for System Identification
Sensors and Intelligent Systems Lab @ Georgia Tech
| System Identification | Filter | MATLAB |

Bio-implants is becoming increasingly popular in modern day life due to their prospect in monitoring, neuro-stimulus, and drug injection. However heat dissipation from complex circuits damages sensitive organs, brain for example can only take a maximum of 0.8˚C increase.
Accurate modeling of the environment is near possible and we hereby attempt to improve the performance of an online predictive model for bio-implants through approximations.
More information on how we used kernal functions to improve the prediction performance of a recursive least squares filter (KRLS).