Vision Based Navigation
PotentialGap
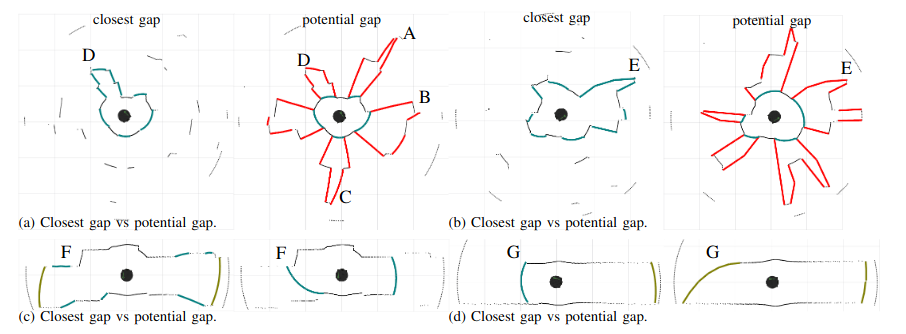
This research project looks at using gap representation, in conjuction with artificial potential fields, to create a navigation system that provides guaranteed collision-free properties when given an idealized robot model.
While this idealized robot assumption seems to make the planner trivial, it is quite easy to extend the planner to non-idealized cases with small modular extensions.
We also proposed a modified representation of 2D perception space representation that only extracts the most relevant configuration space for execution.
Monte-carlo rollouts shows the guaranteed properties and the planner degrades gracefully for unidealized scenarios.
Link to the RA-L paper.
@ARTICLE{9513583,
author={Xu, Ruoyang and Feng, Shiyu and Vela, Patricio A.},
journal={IEEE Robotics and Automation Letters},
title={Potential Gap: A Gap-Informed Reactive Policy for Safe Hierarchical Navigation},
year={2021},
volume={6},
number={4},
pages={8325-8332},
doi={10.1109/LRA.2021.3104623}
}
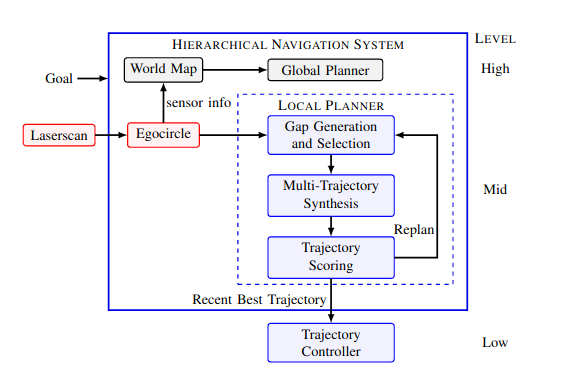
EgoTEB
This particular research project focuses in using perception space representation for an optimal planner to alleviate some of the identified issues related to this particular optimal planner.
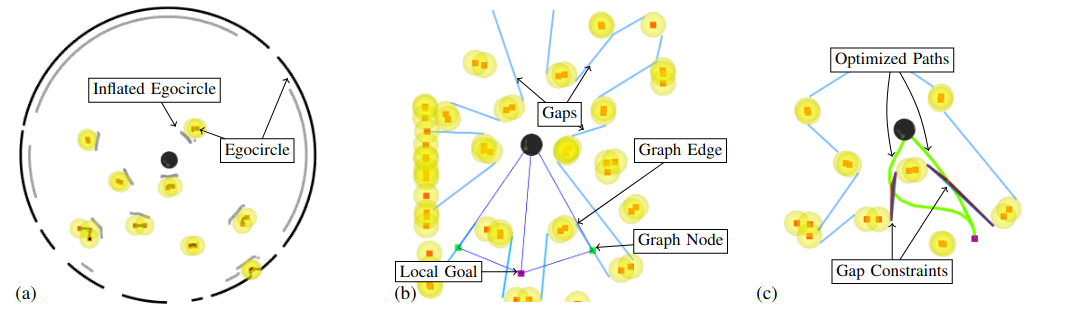
By using an obstacle representatoin in the egocentric frame, we drastically minimized the search space of initial trajectory exploration, we were able to associate multi-trajectory path planning with a constraint that guarantees better homologically different trajectories after optimization. While optimal planners cannot guarantee collision free path generation, we uses perception space collision checking to ensure the end trajectory would be feasible.
Perception space further has the advantage of a better scaling factor with representation resolution and size. Monte-Carlo navigation experiments and timing statistics illustrates the benefits of using perception space navigation.
Link to Lab Website. Link to the conference paper.
@INPROCEEDINGS{9196721,
author={Smith, Justin S. and Xu, Ruoyang and Vela, Patricio},
booktitle={2020 IEEE International Conference on Robotics and Automation (ICRA)},
title={egoTEB: Egocentric, Perception Space Navigation Using Timed-Elastic-Bands},
year={2020},
volume={},
number={},
pages={2703-2709},
doi={10.1109/ICRA40945.2020.9196721}
}