Visual Inertial Odometry
| Robotics | SLAM | DSO | ROS | C++ |
My senior design project is the deployment of visual odometry on a light-weight aerial platform. The aerial platform is the Georgia Tech - Miniature Autonomous Blimp platform at Georgia Tech’s System Research Lab. The blimp’s 70g carrying capability limits its carrying capability to a small noisy analog camera.
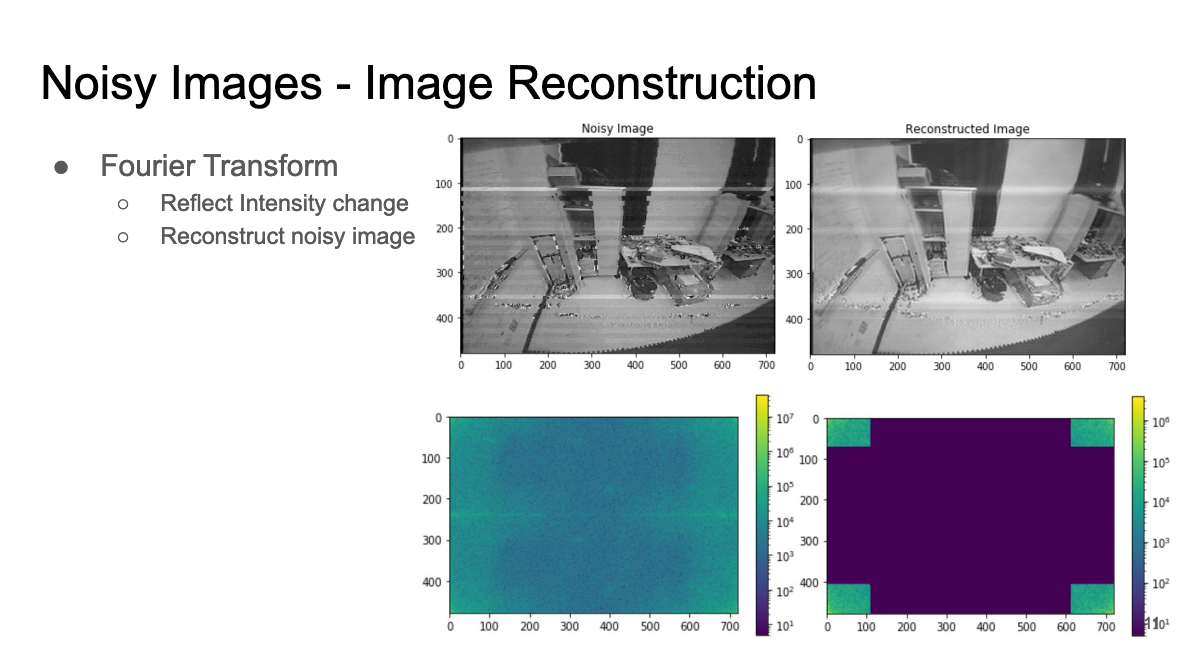
We used gaussian noise variance estimation and fourier domain low frequency noise suppression.

Large rotation remains a major problem in visual odometry for
- Blurry Image
- Lost of feature
- Making the optimization hard to solve
We compensate this problem by giving gyroscope information into the algorithm as a warm start for the optimization.

The project is further documented on the website held by Georgia Tech Capstone Design Project: XXLs Team Website