RoboJackets - IGVC
| Embedded | Control | Power | C++ |
As an undergrad (between 2016 and 2020), I spent a significant amount of time in RoboJackets, a competitive robotics team at Georgia Tech. I am part of Intelligent Ground Vehicle Challenge (IGVC competition link) team and our team is the winner of Design Award First Place and Overall Second Place in 2019.
I build and maintain the electrical system of a 300lb robot with responsibilities varies from:
- Embedded systems
- Custom-designed PCB boards
- Power management
- 24V 60A max DC motor
- Other voltage levels for different electronics
- emergency stop system
- Controls
- Motor controls
- Auto tuning control algorithms
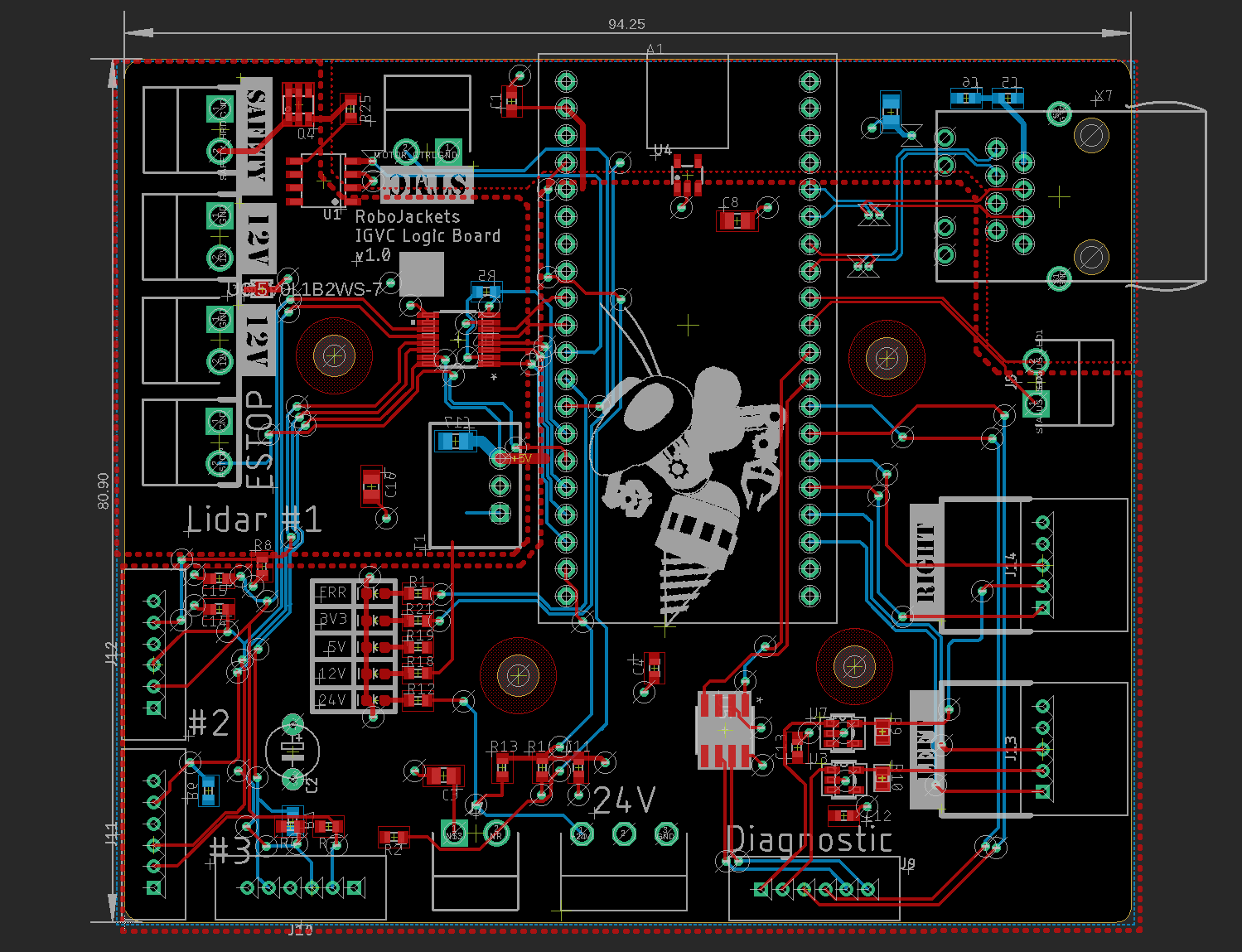
I maintain (read: it’s my baby) the control board (internally titled Logic Board) on our robot. Its main function includes relaying software stack command information to the electrical system, performing control algorithm as well as report critical operating information back to the software stack including emergency stop status, battery voltage, and a number of others. A link to logic board documentation can be found here.
More information can be found in our Wiki and our Github Electrical and firmware
